
上村 知也助教が,計測自動制御学会 中部支部 第五十三期支部賞奨励賞を受賞しました。
2023年2月 3日掲載
(受賞課題:全身の受動的な動力学を活用してヒトや動物に近い歩行・走行を実現する脚移動ロボット)
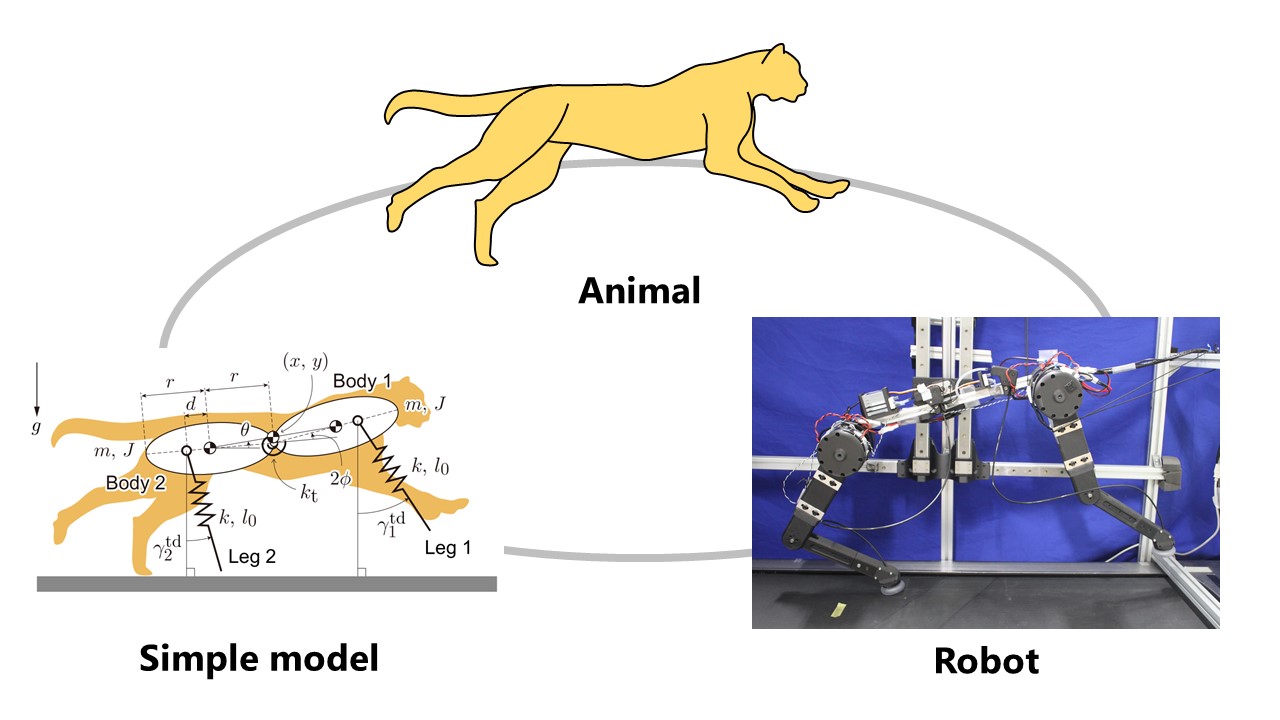
本研究室では,受動的な動力学メカニズムに基づいて,ヒトや動物に近い2足・4足ロボットの開発を行っています.現在の研究では,脚部の運動だけでなく,受動的な胴体部の運動,特に柔軟要素の運動に着目しています.
2足ロボットにおいては,上体部に揺動する慣性体を取り付けることで,走行中には地面を従来よりも強い力で蹴るようになり,歩行中には安定性が改善されることを明らかにしました.これらの結果から,ヒトの運動においても同様に柔軟要素の揺動を活用している可能性が示唆されます.また,4足ロボットの走行を効率化するために,チーターが背骨の曲げ伸ばし運動を活用して高速走行を実現する原理を,シンプルなモデルを用いた動力学的な解析から明らかにしてきました.
これらの結果は,全身の受動的な力学を活用した,エネルギー効率の良いロボットの開発に貢献するだけにとどまらず,ヒトや動物がどのようにして巧みで効率の良い運動を実現しているのかという知見を与えると期待されます.
【関連ウェブサイト:計測自動制御学会 中部支部 第53期支部賞】
工学専攻の朝熊 紀文さんが第61回セラミックス基礎科学討論会 Excellent Presentation Awardを受賞しました。 工学専攻の原田 誠一さんが第20回情報科学技術フォーラム FIT船井ベストペーパー賞を受賞しました。