
カプセル内視鏡の高品質画像伝送や体内医用ロボットの高速制御が可能に ―― 1秒当たり1千万ビットの体内高速無線通信機の開発に成功
News&Topics
カテゴリ:プレスリリース|2018年9月20日掲載
名古屋工業大学は、総務省戦略的情報通信研究開発推進事業(SCOPE)の援助を受け、体内深部から体外へ1秒当たり1千万ビット(10Mbps)の高速無線通信機の開発に成功しました。
ノルウェー・オスロ大学病院の協力を得て、ブタを用いた生体実験により体内26cmの深部までの高速通信を実証しました。この成果は、体内深部まで到達した信号では世界最速の通信速度であり、米国電気電子学会(IEEE)に論文として採択され、その内容はIEEEのウェブサイトに掲載されました。
研究の詳細
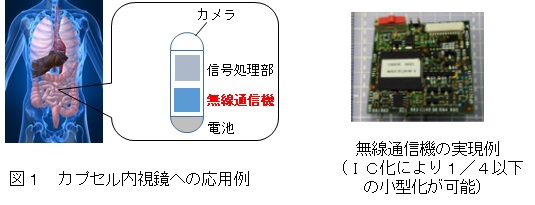
体内から体外への高速無線通信機の用途の一例としては、カプセル内視鏡のような体内に長時間滞留し、撮った画像を体外へ高画質で伝送するリモート診断があげられます。また、体内を移動して患部に薬剤注入やサンプル採取・切除などの体内医用ロボットに対する体外での無線制御も期待され、医療分野を中心に多岐にわたります。
人体の内部から外部への無線通信は、現在は400MHz付近の狭い周波数帯の利用が主流であり、通信速度は1秒当たり数十万ビット程度で、高速・大容量・高画質な画像伝送及び動画伝送が困難です。これに対し、10~60MHzの微弱無線周波数帯は,人体での伝搬損失が400MHz帯に比べて遥かに小さく、人体深部までの通信が可能であるうえに、広い周波数帯域が総務省の認証なく使用できる特徴を有しています。名古屋工業大学・王 建青教授の研究グループは、この特徴に着目し、10~60MHzの広帯域パルス伝送方式を採用した体内深部まで1秒当たり1千万ビットの高速通信機の開発に成功しました。まず、広帯域信号が人体を伝送中に生ずる信号波形の歪みを元の形状に戻す波形整形技術を開発し、当周波数帯を利用した高速通信時に生ずる符号間干渉問題を解消しました。次に、当周波数帯でのアンテナ小型化の難しさを、磁性材料の波長短縮効果を利用して解決しました。その結果、従来に比べ30倍以上の高速通信を体内深部においてまで達成しました。
現在、実用化に不可欠な通信機全体の小型化に向けて、千葉大学フロンティア医工学センターと協力し、飲込める程度の超小型アンテナの開発を進めており、さらに、通信機回路全体の集積回路(IC)化を推進しています。
1秒当たり1千万ビットの通信速度を体内深部26cmまで達成した本研究の成果は、ほぼすべての体型の人間に対して、体内あらゆる場所と体外との間の高速通信ができることを意味します。通信機の実用化により、様々な医療・福祉・ヘルスケア分野での応用が期待できます。たとえば、
(1) 本通信機をカプセル内視鏡へ実装すれば、1枚ずつ体外へ伝送する画像の画質が飛躍的によくなり、腫瘍診断の信頼性の向上や早期発見などに繋がり、動画でのリアルタイム診断も現実的になります。(図1)
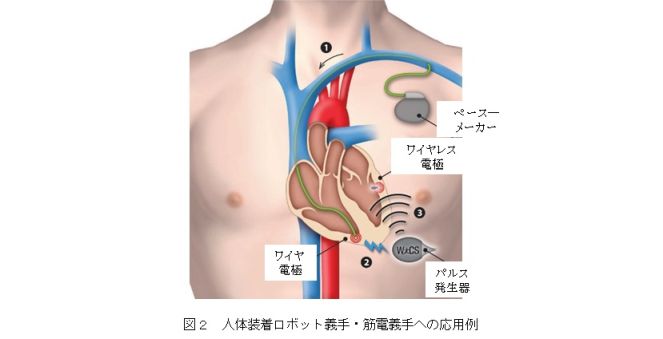
(2) 本通信機を生体センサと一体化すれば、生体センサが体内どの位置に配置しても、その場所での生体情報を高速で体外また体内の他の場所へ送信でき、病状のモニタリングや診断・対処に利用できます。例えば、心臓疾患患者に装着される心臓ペースメーカーは、パルス発生器を有するペースメーカー本体と心臓に挿入される電極からなりますが、本通信技術を利用すれば、パルス発生器と電極間との接続をワイヤレス化することが可能で、利用形態の多様性と利便性が著しく向上されます。(図2)
(3) 本通信機を体内医用ロボットへ実装すれば、一度多数の制御信号を同時に体外から体内あらゆる箇所まで伝送することができ、多数のモーターを同時に動かしたり、一度多数の病体サンプルを採取して体外へ送ったりすることができ、より細かな医用ロボットの動作制御が可能になります。
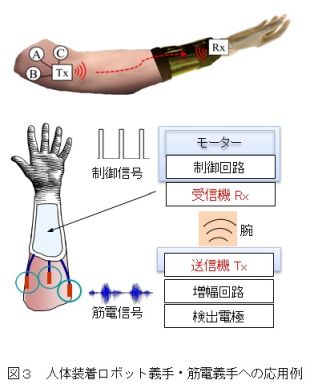
(4) 体内深部から体外への通信だけでなく、体表での通信にも応用できます。例えば、体表複数箇所で筋電信号を取得し、それらを人体に装着されるロボット義手に高速で送り、多数の義手駆動モーターを低遅延で同時に制御することができます。これにより、人体装着型義手ロボットをヒトのように巧みに動かし、実際のヒトよりさらに力の要る仕事(産業ロボット)やヒトの手や指でできる仕事よりさらに精巧な仕事(精密ロボット)をすることができます。また、事故で腕や足を失った方の義肢や、病気で脳の指令が四肢に伝わらない患者の四肢のワイヤレス制御にも応用できます。(図3)
お問い合わせ先
研究に関すること
名古屋工業大学大学院工学研究科
電気・機械工学専攻 教授 王 建青
Tel: 052-735-5457
E-mail: wang[at]nitech.ac.jp
広報に関すること
名古屋工業大学企画広報課
Tel: 052-735-5647
E-mail: pr[at]adm.nitech.ac.jp
*それぞれ[at]を@に置換してください。
放射光を使ってミクロの糸球体を見る SGLT2阻害薬による糖尿病マウス糸球体1万個への作用を明らかとする 大須地区回遊行動調査~幅広い世代が楽しむ「賑わい場」を科学する~大須で人々はどのようにお店を巡る??工学的に分析!